previous (simple harmonic oscillator) index next (critical damping)
Oscillations I: Heavily Damped Oscillator
Michael Fowler
Introduction
In the next three lectures, we'll look at a wide variety of oscillatory phenomena. After a brief recap of undamped simple harmonic motion, we analyze the motion of a heavily damped oscillator. Why start with that? Well, the math is very straightforward (no complex numbers) and there is some nontrivial physics. Following that, we'll cover the lightly damped oscillator, where we do need complex numbers—avoiding them leads to very cumbersome trigonometry. We'll also discuss the important intermediate case called critical damping. Finally, in the third lecture, we examine the physically very relevant case of a driven damped oscillator—and when that leads to disaster.
Applets
We have a set of easy-to-use applets illustrating these oscillators—and it's a great way to get a feel for the subject! If you're already pretty familiar with simple harmonic motion, you can skip or just glance through the next section, and begin exploring the heavily damped oscillator with this applet.
Brief Review of Undamped Simple Harmonic Motion
Our basic model simple harmonic oscillator is a mass moving back and forth along a line on a smooth
horizontal surface, connected to an inline horizontal spring, having spring
constant the other end of the string being attached to
a wall. The spring exerts a restoring force equal to on the mass when it is a  distance
from the equilibrium point. By “equilibrium point” we mean the point
corresponding to the spring resting at its natural length, and therefore
exerting no force on the mass. The in-class realization of this model was an
aircar, with a light spring above the track (actually, we used two light
springs, going in opposite directionswe found
if we just one it tended to sag on to the track when it was slack, but two in
opposite directions could be kept taut.
The two springs together act like a single spring having spring constant
the sum of the two).
distance
from the equilibrium point. By “equilibrium point” we mean the point
corresponding to the spring resting at its natural length, and therefore
exerting no force on the mass. The in-class realization of this model was an
aircar, with a light spring above the track (actually, we used two light
springs, going in opposite directionswe found
if we just one it tended to sag on to the track when it was slack, but two in
opposite directions could be kept taut.
The two springs together act like a single spring having spring constant
the sum of the two).
Newton’s Law gives:
Solving this differential equation gives the position of the mass (the aircar) relative to the rest position as a function of time:
Here is the maximum displacement, and is called the amplitude of the motion. is called the phase. is called the phase constant: it depends on where in the cycle you start, that is, where is the oscillator at time zero.
The velocity and acceleration are given by differentiating once and twice:
and
We see immediately that this does indeed satisfy Newton’s Law provided is given by
Exercise: Verify that, apart from a possible overall constant, this expression for could have been figured out using dimensions.
Energy Conservation in Undamped Simple Harmonic Motion
The spring stores potential energy: if you push one end of the spring from some positive extension to (with the other end of the spring fixed, of course) the force opposes the motion, so you must push with force and therefore do work To find the total potential energy stored by the spring when the end is away from the equilibrium point (the natural spring length) we must find the total work required to stretch the spring from that resting length to an extension This means adding up all the little bits of work needed to get the spring from no extension at all to an extension of In other words, we need to do an integral to find the potential energy
So the potential energy plotted as a function of distance from equilibrium is parabolic:
The oscillator has total energy equal to kinetic energy + potential energy,
when the mass is at position Putting in the values of from the equations above, it is easy to check that is independent of time and equal to being the amplitude of the motion, the maximum displacement. Of course, when the oscillator is at it is momentarily at rest, so has no kinetic energy.
Heavily Damped Oscillator: Pendulum in Molasses
Once we allow damping, it turns out that heavy damping is a little easier to deal with than light damping, so we'll look at this first. (When, exactly, does damping count as heavy? We'll see shortly.)
Suppose, then, the oscillator is subject to a drag force proportional to velocity.
The equation of motion is:
Although this equation looks much more difficult than the no-drag case, it really isn’t!
The important point is that the terms are just derivatives of with respect to time, multiplied by constants. The math would be a lot more difficult if we had a drag force proportional to the square of the velocity, or if the force exerted by the spring were not a constant times (this means we can’t stretch the string too farthey all go nonlinear for a big enough stretch). Anyway, it is easy to find exponential functions that are solutions to this equation. Let us guess a solution:
We're guessing that, thanks to the molasses it won't actually oscillate. Can that be right? We'll find out. Inserting this proposed solution in the equation of motion, using
we find that it is a valid solution provided that satisfies:
from which
Staring at this expression for , we notice that for to be real, we need to have
What can that mean? Remember is the damping parameterwe’re finding that our proposed exponential solution only works for large damping! (We know physically, of course, that if the damping is small, the pendulum will swing, a motion not described by our exponential decay function.) We'll analyze the large damping case now, then after that go on to see how to extend the solution to small damping.
Interpreting the Two Different Exponential Solutions
If you haven't already done so, at this point pull up the applet and look through the suggestions.
It’s worth looking at the case of very large damping (imagine our mass and spring being in a tub of molasses), where the two exponential solutions turn out to decay at very different rates. For much greater than we can write
and then expand the square root using
valid for small to find that approximatelyfor large the two possible values of are:
That is to say, there are two possible highly damped decay modes,
Note that since the damping is large, is large, meaning fast decay, and is small, meaning slow decay.
Question: what,
physically, is going on in these two different highly damped exponential
decays? Here's a picture of two identical oscillators, with the same damping, generated by the applet: 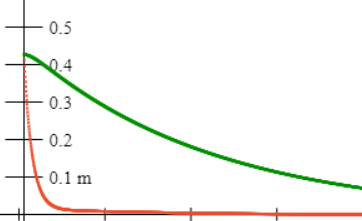 Can you reconstruct it using the applet, and explain physically why two very different
rates of change of speed are possible?
Can you reconstruct it using the applet, and explain physically why two very different
rates of change of speed are possible?
Hint: look again at the equation of motion of the damped oscillator. Notice that in each of these highly damped decays, one term doesn’t play any partbut the irrelevant term is a different term for the two decays!
Answer 1: for , evidently the mass doesn’t play a role. This decay is what you get if you pull the mass to one side, let go, then, after it gets moving, it will very slowly settle towards the equilibrium point. Its rate of approach is determined by balancing the spring’s force against the speed-dependent damping force, to give the speed. The rate of change of speedthe accelerationis so tiny that the inertial termthe massis negligible.
Answer 2: for , the spring is negligible. And, this is very fast motion ( since we said ) The way to get this motion is to pull the mass to one side, then give it a very strong kick towards the equilibrium point. If you give it just the right (high) speed, all the momentum you imparted will be spent overcoming the damping force as the mass moves to the centerthe force of the spring will be negligible.
*The Most General Solution for the Highly Damped Oscillator
The damped oscillator equation
is a linear equation. This means that if is a solution, and is another solution, that is,
then just adding the two equations we get:
It is also clear that multiplying a solution by a constant produces another solution: if satisfies the equation, so does
This means, then, that given two solutions and and two arbitrary constants and the function
is also a solution of the differential equation.
In fact, all possible motions of the highly damped oscillator have this form. The way to understand this is to realize that the oscillator’s motion is completely determined if we specify at an initial instant of time both the position and the velocity of the oscillator. The equation of motion gives the acceleration as a function of position and velocity, so, at least in principle, we can work out step by step how the mass must move; technically, we are integrating the equation of motion, either mathematically, or numerically such as by using Mathematica or a spreadsheet. So, by suitably adjusting the two arbitrary constants and we can match our sum of solutions to any given initial position and velocity.
To summarize, for the highly damped oscillator any solution is of the form:
Exercises on highly damped oscillations
1. If the oscillator
is pulled aside a distance and released from rest at what are ? Describe the subsequent motion, especially
the very beginning: what is the initial acceleration? Hint:
think carefully about how important the damping term is immediately after
release from restyou should
be able to guess the initial
acceleration. Look at this graph from 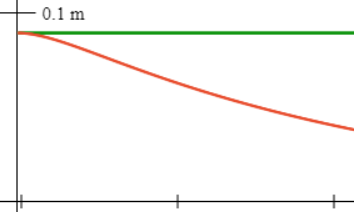 the applet, we set one spring equal to zero.
the applet, we set one spring equal to zero.
2. If the oscillator is initially at the equilibrium position but is given a kick to a velocity find and and describe the subsequent motion.
*The Principle of Superposition for Linear Differential Equations
The equation for the highly damped oscillator is a linear differential equation, that is, an equation of the form (in more usual notation):
where and are constants, that is, independent of
For such a linear differential equation, if and are solutions, so is for any constants
This is called the Principle of Superposition, and is proved in general exactly as we proved it for the highly damped oscillator in the preceding section.
Even more important, this Principle of Superposition is valid, using analogous arguments, for linear differential equations in more than one variable, such as the wave equations we'll be considering shortly. In that case, it gives insight into how waves can pass through each other and emerge unchanged.